
Autor
Somos capaces de hacer realidad sueños, “EL FUTURO ESTÁ EN LA INVESTIGACIÓN”.
Víctor Xavier Enríquez Champutiz
Corregir los hechos, desafío incierto,
la realidad y el recuerdo, en duelo abierto.
En el vaivén del tiempo, la historia se ajusta,
mis memorias, acaso, la realidad robusta.
Así es como lo recuerdo…
PROYECTO “DETECCIÓN, OBSERVACIÓN, COMUNICACIÓN RECONOCIMIENTO DOCR”
El CIDFAE con las fortalezas, capacidades, aciertos y desaciertos conseguidos con la ejecución del Proyecto PGA, desde el año 2008; su nombre está presente cuando se habla de investigación, desarrollo e innovación tecnológica en el campo aeronáutico y aeroespacial, es así que el CIDFAE es invitado al “Taller de Direccionamiento de los proyectos de investigación y Tecnología Militar con las capacidades de Fuerzas Armadas” organizado por la Dirección de Operaciones del COMACO el 25 de marzo de 2010, en donde se prioriza la idea del diseño y construcción de UAV con aplicaciones de detección, observación, comunicaciones y reconocimiento, por ello el nombre del proyecto DOCR.
OBJETIVOS DEL PROYECTO DOCR
Implementar un sistema de detección, observación, comunicación y
reconocimiento, con operación autónoma, comando y control centralizado, que
permitan cumplir misiones de vigilancia y reconocimiento, en los sectores de
interés operacional.
Construir un subsistema de aviones no tripulados
Desarrollar un Sistema prototipo de reconocimiento terrestre, utilizando un
agrupamiento de blindados
Crear un sistema prototipo de reconocimiento de tres estaciones base
autónomas.




La metodología utilizada fue muy similar a la del Proyecto PGA, iniciar con prototipos pequeños, probar conceptos, incrementar capacidades e ir escalando en tamaño, capacidad y complejidad en los sistemas; el proceso fue mucho más rápido debido a todo lo aprendido en el anterior proyecto.
| PROTOTIPO | OBJETIVO |
| Prototipo Gorrión | Entrenador para vuelo radio controlado; posterior fue utilizado como plataforma aérea para las pruebas del PILOTO AUTOMÁTICO NACIONAL. |
| Prototipo Pelícano | Se integró un piloto automático para dominar conceptos como waypoint, diseño e implementación de misiones de vuelo UAV, se integra una cámara sin transmisión en tiempo real. HITO 8 de agosto del 2012 cumple un periodo de vuelo entre SALCEDO y AEROPUERTO CHACHOAN EN AMBATO, tiempo 40 minutos. |
| Prototipo Cotopaxi | Modificación estructural del fuselaje del Prototipo RPV, del Proyecto RAYO, se incluyeron mejoras estructurales, OTRO sistema de energía y un nuevo sistema de guiado, navegación y control. |
| Prototipo Fénix | A lo expuesto, se sumó un sistema completo de instrumentación para monitorear motor, energía, comunicaciones en base a un CRIO de National Instrument. |
| Prototipo Gavilán 001 FAE-120 | Considerado el primer prototipo entregable del proyecto DOCR, sistemas de GNC, instrumentación, comunicaciones, integrado el electróptico NACIONAL con TX de fotografía y video en tiempo real (despegue y aterrizaje en modo radio control, vuelo UAV), tiempo autonomía 4 horas. |
| Prototipo Gavilán 002 FAE-1381 | Mejoras aerodinámicas, sistema de frenado inteligente, integración de sistema para despegue y aterrizaje en modo automático, tiempo autonomía 6 horas y un alcance de 38 km efectivos con la posibilidad de extenderse a 72 km. |
Durante el proceso de validación ocurrieron 02 accidentes, el FAE-120 (26-MAY-2014) y FAE-1381 (14-OCT-2015); este tras pie en el proceso de investigación y desarrollo, puede ser interpretado como un ERROR FATAL o UNA OPORTUNIDAD DE MEJORA (ciertamente depende del punto de vista); sin embargo, el CIDFAE fue puesto bajo la lupa y se tomó la decisión de paralizar la etapa de validación hasta determinar las causas de los accidentes.
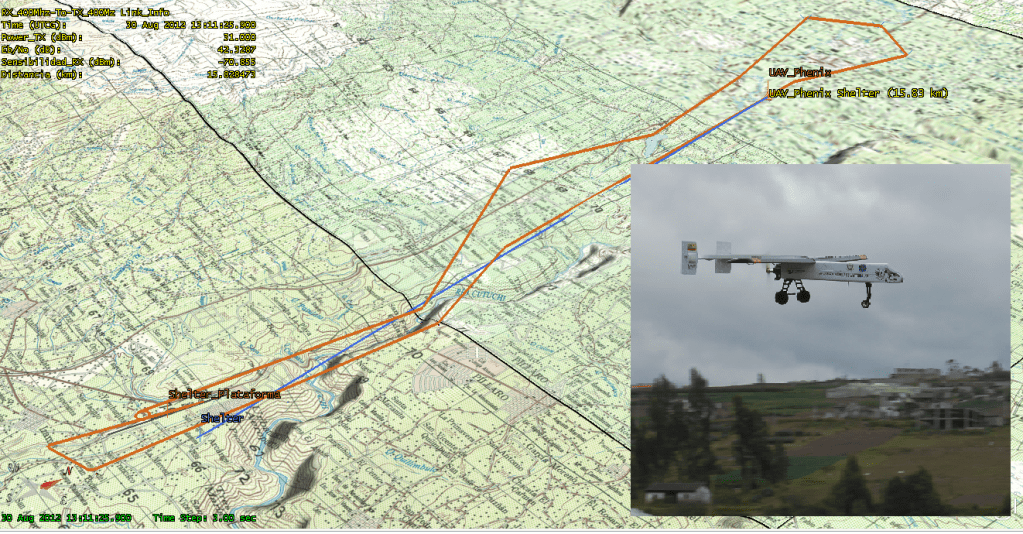
Un HITO olvidado: el Prototipo UAV-1 Phoenix, el 29 de MAYO del 2012 se cumplió el PRIMER VUELO DE UNA AERONAVE UAV Clase II ecuatoriano, en la ruta SALCEDO y AEROPUERTO CHACHOAN EN AMBATO, por un tiempo 40 minutos, 18 Km punto más lejano de la EMCT y TX de video y datos en tiempo real.
Las Juntas Investigadoras de Accidentes JIA, realizaron su proceso y con la facilidad de contar con todos los datos de los vuelos de los UAV accidentados, mismos se encontraban almacenados en el Estación de Mando y Control, se determinó que NO existieron causas técnicas, ni fallas en el diseño de los sistemas que causaron los accidentes.
Cuando se tuvieron los resultados de la investigación, ya era demasiado tarde, el gobierno ante la demora había decidido utilizar el recurso económico de reposición de los seguros de las aeronaves accidentadas, en otras necesidades muy ajenas a la investigación y desarrollo.
A este escenario se sumó las fallas administrativas detectadas por la Contraloría General del Estado en la ejecución del presupuesto asignado, problema que tomaría algo así como 3 años en determinarse responsabilidades (de este caso se podría escribir un capítulo completo).
El inicio del fin del sueño llamado UAV Clase 2 ecuatoriano…
La falta de presupuesto y ante la incertidumbre del futuro de nuevos proyectos de investigación, NO SE CUMPLIÓ UN ORDENADO PROCESO DE TRANSFERENCIA DE CONOCIMIENTO, las consecuencias fueron inmediatas, como, por ejemplo:
Pérdida de conocimiento: Los investigadores de las universidades tomaron diferentes rumbos muchos alejados de la investigación en el campo aeroespacial, el centro tuvo que acudir a tesistas sin pago para tratar de continuar con el proceso de I+D+i; por su el Mando de la FAE tomó la decisión de dejar en el CIDFAE el personal mínimo, llegando a contar con tan solo UN SOLO INGENIERO MILITAR a cargo del Departamento de Proyectos del CIDFAE, posterior este último ingeniero sería reemplazado por otro oficial que no contaba con ningún título académico; otro ejemplo más de lo que hemos denominado la “insoportable arbitrariedad de lo circunstancial” (Léase en el siguiente link).
Duplicación de esfuerzos: Si el conocimiento no se comparte, las personas pueden estar trabajando en proyectos similares o realizando tareas que ya han sido realizadas por otros. Esto puede causar una pérdida de tiempo y recursos.
Ineficiencia: Si el conocimiento no se comparte, las personas pueden tomar decisiones basadas en información incompleta o inexacta. Esto puede llevar a la toma de decisiones erróneas y a la pérdida de oportunidades.
Desmotivación: Si las personas no tienen la oportunidad de aprender y crecer, pueden sentirse desmotivadas y menos comprometidas con su trabajo. Esto puede afectar negativamente al rendimiento de la organización.
En general, el no cumplir el proceso de transferencia de conocimiento produjo consecuencias negativas que afectaron el proceso de investigación y desarrollo en el campo aeroespacial del Ecuador.

Hasta el 14-OCT-2015 se habían cumplido 288 periodos con un registro de 3.800 minutos de vuelo de los prototipos intermedios y 39 periodos con un registro de 1.251 minutos de los prototipos finales (FAE-120 y FAE-1381).
A partir del 14-OCT-2015, el motor del Gavilán UAV ecuatoriano (Clase 2) nunca más volvió a surcar los cielos del Ecuador.
Tesis de tercer y cuarto nivel desarrolladas:
| ORD | TÍTULO | UNIVERSIDAD INSTITUCION | AÑO |
| 1 | Materiales Compuestos | 2005 | |
| 2 | Diseño de la plataforma de despegue para el vehículo aéreo piloteado por control remoto (RPV) desarrollado en el CIDFAE ALA No. 12 y construcción de la Plataforma a escala 1:5 | ESCUELA POLITÉCNICA DEL EJÉRCITO | 2006 |
| 3 | Diseño preliminar del UAV «Halcón» | INSTITUTO UNIVERSITARIO AERONAUTICO | 2011 |
| 4 | Sistema Electrónico para el control del Aterrizaje de Emergencia de los Vehículos Aéreos no Tripulados (UAV) del CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2012 |
| 5 | Estudio estructural del ala de un vehículo aéreo no tripulado para la optimización de su peso en el CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2012 |
| 6 | Sistema Neumático para la Optimización de los Procesos de Construcción de Aeronaves No Tripuladas en el CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2012 |
| 7 | Estudio de la configuración estructural y ergonómica de SHELTER, para el personal que monitorea y controla los UAV en el CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2013 |
| 8 | Diseño y construcción del sistema de apuntador electromecánico de antenas para ampliar el rango de operatividad del proyecto UAV del CIDFAE | ESCUELA POLITÉCNICA DEL EJÉRCITO, EXTENSIÓN LATACUNGA | 2013 |
| 9 | Medición de la compresión de cilindros del motor continental teledyne modelo IO-360 D (21) para la detección en la carrera de mecánica del ITSA. | INSTITUTO TECNOLOGICO SUPERIOR AERONAUTICO | 2013 |
| 10 | Sistema de comunicación de datos para aviones no tripulados UAV durante misiones de vuelo en el CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2013 |
| 11 | Diseño e Implementación del Sistema de Instrumentación de un Vehículo Aéreo No Tripulado | ESCUELA POLITÉCNICA NACIONAL | 2013 |
| 12 | La Gestión de Riesgos y su Incidencia en las Condiciones de Seguridad y Ambiente del CIDFAE | ESCUELA POLITÉCNICA DEL EJÉRCITO, EXTENSIÓN LATACUNGA | 2014 |
| 13 | Diseño e implementación de una aplicación móvil que cumpla la función de Estación en Tierra para el monitoreo de UAV’S en el CIDFAE | ESCUELA POLITÉCNICA DEL EJÉRCITO, EXTENSIÓN LATACUNGA | 2014 |
| 14 | Diseño e implementación de un sistema automatizado de prevuelo para el prototipo UAV1 Fénix de la Fuerza Aérea Ecuatoriana. | ESCUELA POLITÉCNICA DEL EJÉRCITO, EXTENSIÓN LATACUNGA | 2014 |
| 15 | Direccionamiento estratégico y la toma de decisiones del CIDFAE | UNIVERSIDAD TECNOLÓGICA “INDOAMERICA” | 2014 |
| 16 | Desarrollo de un sistema de control y monitoreo de un vehículo terrestre no tripulado UGV (Unmanned Ground Vehicle) para el CIDFAE. | ESCUELA POLITÉCNICA DEL EJÉRCITO, EXTENSIÓN LATACUNGA | 2015 |
| 17 | Materiales compuestos poliméricos con matriz poliéster y fibra de carbono y su incidencia en las propiedades mecánicas de tracción | UNIVERSIDAD TECNICA DE AMBATO | 2015 |
| 18 | Diseño de un modelo de gestión por procesos para el CIDFAE | UNIVERSIDAD POLITECNICA SALESIANA SEDE QUITO | 2015 |
| 19 | Diseño e implementación de un sistema electrónico de prevuelo para el autopiloto Pelícano desarrollado en el CIDFAE | ESCUELA POLITÉCNICA DEL EJÉRCITO, EXTENSIÓN LATACUNGA | 2015 |
| 20 | Diseño, construcción y control de un hexacóptero de monitoreo | ESCUELA POLITECNICA NACIONAL | 2015 |
| 21 | Estudio de la Configuración Estructural de los Materiales Compuestos Sintéticos estratificados de matriz epoxi y su influencia en las propiedades mecánicas del fuselaje de los vehículos aéreos no tripulados (UAV) del CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2015 |
| 22 | La gestión por procesos y la eficiencia operativa del CIDFAE | UNIVERSIDAD TECNOLÓGICA INDOAMÉRICA | 2015 |
| 23 | Gestión de calidad para los procesos operativos en el área de ensamblaje del CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2015 |
| 24 | Paper Análisis, diseño e implementación de un autopiloto para aeronaves no tripuladas UAVs basado en Lógica Difusa | ESCUELA POLITECNICA NACIONAL | 2015 |
| 25 | Estudio de sistemas de sujeción para ensamblaje estructural de las alas de la aeronave no tripulada Gavilán del CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2015 |
| 26 | Estudio de un sistema de refrigeración de elementos electrónicos para el control de temperatura en tierra del UAV Gavilán del CIDFAE. | UNIVERSIDAD TECNICA DE AMBATO | 2015 |
| 27 | Proceso de ensamblaje de aviones no tripulados para el Centro de Investigación y Desarrollo de la Fuerza Aérea Ecuatoriana (CIDFAE) | UNIVERSIDAD TECNICA DE AMBATO | 2015 |
| 28 | La gestión documental y su incidencia en la recuperación y acceso a la información del CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2016 |
| 29 | Análisis estructural del Twin Boom para optimización del peso en el avión no tripulado Gavilán del CIDFAE. | UNIVERSIDAD TECNICA DE AMBATO | 2016 |
| 30 | Análisis estructural cuadernas centrales para optimizar el peso en el UAV gavilán en el CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2016 |
| 31 | Análisis de recubrimientos utilizados sobre el material compuesto (Fibra de carbono + Resina Epoxi) y su incidencia en la calidad de las aeronaves fabricadas en el CIDFAE. | UNIVERSIDAD TECNICA DE AMBATO | 2017 |
| 32 | Sistema de acondicionamiento de señales digitales para la ampliación del rango de alcance del radio control de aeronaves no tripuladas en el CIDFAE | UNIVERSIDAD TECNICA DE AMBATO | 2015 |
| 33 | Diseño y construcción de un sistema de Geo-estabilización para un sistema electro-óptico utilizando un sensor inercial y un GPS | ESCUELA POLITECNICA NACIONAL | 2012 |
| 34 | Diseño y construcción del sistema de enfoque automático para una cámara térmica, usando procesamiento de imágenes MATLAB | ESCUELA POLITECNICA NACIONAL | 2014 |
| 35 | Diseño, construcción y control de un hexacoptero de monitoreo | ESCUELA POLITECNICA NACIONAL | 2015 |
| 36 | Diseño e implementación de un sistema de tele operación para una Plataforma aérea | ESCUELA POLITECNICA NACIONAL | 2015 |
| 37 | Diseño e implementación de un prototipo de detección de carril mediante visión artificial | ESCUELA POLITECNICA NACIONAL | 2016 |
| 38 | Diseño e implementación de un sistema de monitoreo para una Plataforma aérea usando sistemas embebidos | ESCUELA POLITECNICA NACIONAL | 2016 |
| 39 | Diseño e implementación de un sistema de adquisición de video y medición de distancia durante el retroceso de un vehículo en un dispositivo móvil | ESCUELA POLITECNICA NACIONAL | 2016 |
| 40 | Tele operación de un hexacóptero con realimentación de fuerza mediante un simulador en ambientes semiestructurados | ESCUELA POLITECNICA NACIONAL | 2016 |
| 41 | Automatización de un Hexacóptero para despegue aterrizaje y vuelo en un camino cerrado | ESCUELA POLITECNICA NACIONAL | 2015 |
| 42 | Diseño y construcción de una aeronave no tripulada Área Energía (Guiado Navegación y Control de sistemas aéreos no tripulados UAS) | ESCUELA POLITECNICA NACIONAL | 2012 |
| 43 | Diseño y construcción de la estructura mecánica y pruebas de vuelo de un hexacóptero de monitoreo para aplicaciones militares | ESCUELA POLITECNICA NACIONAL | 2017 |
| 44 | Diseño e implementación de un sistema de navegación inercial tipo STRAPDOWN para estimar la posición de un robot móvil, aplicable a un prototipo de autopiloto de un UAV | ESCUELA POLITECNICA NACIONAL | 2013 |
| 45 | Diseño y construcción de un sistema óptico para análisis espectral utilizando la técnica LIF (Fluorecencia inducida por luz) | ESCUELA POLITECNICA NACIONAL | 2015 |
| 46 | A hexacopter models comparison using backstepping-sliding mode control | ESCUELA POLITECNICA NACIONAL | 2015 |
| 47 | Sistema de monitoreo para una plataforma aérea usando sistemas embebidos | ESCUELA POLITECNICA NACIONAL | |
| 48 | Sistema de simulación de atmósfera y temperatura controlada para bajas presiones | ESCUELA POLITECNICA NACIONAL | |
| 49 | El sedentarismo y su incidencia en el rendimiento físico del personal perteneciente al CIDFAE (Centro de Investigación y Desarrollo de la Fuerza Aérea) del Cantón Ambato, Provincia de Tungurahua. | UNIVERSIDAD TECNICA DE AMBATO | 2013 |
| 50 | “Determinación de plomo sérico en sangre, como indicador de intoxicación en militares de la FAE especializados en la manipulación de combustibles de aviones” | UNIVERSIDAD TECNICA DE AMBATO | 2015 |
| 51 | Implementación y configuración de una Intranet con su respectiva seguridad en el edificio del CIDFAE. | UNIVERSIDAD TECNICA DE AMBATO | 2007 |
| 52 | Diseño y construcción de un soporte para el sensor electro-óptico SEO-D1 a ser instalado en el helicóptero th57 de la FAE, para lograr la mínima afectación aerodinámica y estructural. | UNIVERSIDAD TECNICA DE AMBATO | 2017 |
| 53 | Capacitación sobre las técnicas de Mantenimiento acorde al tipo de maquinaria en las Instalaciones del centro de investigación y desarrollo de la Fuerza Aérea Ecuatoriana | UNIVERSIDAD TECNICA DE AMBATO | 2012 |
| 54 | Autopiloto prototipo Cero | ESCUELA POLITECNICA NACIONAL | 2013 |
| 55 | Diseño e implementación de un sistema de navegación inercial tipo Strapdown para estimar la posición de un robot móvil, aplicable a un prototipo de autopiloto de un UAV. | ESCUELA POLITECNICA NACIONAL | 2013 |
| 56 | Evaluación inicial del CIDFAE considerando la ejecución de convenios de cooperación tecnológica con la academia. | CIDFAE | 2015 |
| 57 | Proceso de investigación y desarrollo del sistema de guiado, navegación y control para aeronaves no tripuladas | CIDFAE | 2016 |
| 58 | Diseño y construcción de un Espectrómetro Óptico por USB | CIDFAE | 2016 |
| 59 | Desarrollo de la estructura para soporte del sensor Electro Óptico para Aeronaves | CIDFAE | 2014 |
| 60 | Informe de actividades de los laboratorios del departamento de automatización y control industrial (DACI) | ESCUELA POLITECNICA NACIONAL | 2015 |
| 61 | Análisis, diseño e implementación de un sistema de energía para aeronaves no tripuladas UAV’S usando baterías de litio fosfato de hierro | CIDFAE | 2016 |
| 62 | Determinación de las capacidades de un autopiloto para el control de Aeronaves No Tripuladas UAVs. | CIDFAE | 2015 |
| 63 | Tesis y publicaciones 2015-2016 | EPN-CIDFAE | 2015 |
| 64 | Optimización de un tren de aterrizaje para las aeronaves no tripuladas Gavilán. | CIDFAE | 2014 |
| 65 | Diseño e implementación de un sistema electrónico de prevuelo para el autopiloto Pelicano desarrollado en el CIDFAE, ubicado en el sector Izamba de la Ciudad de Ambato | CIDFAE | 2015 |
| 66 | Diseño y simulación virtual de un mecanismo de arranque y soportes para el equipo de apoyo del proyecto RPV COTOPAXI” | ESCUELA POLITÉCNICA DEL EJÉRCITO, EXTENSIÓN LATACUNGA | 2006 |
| 67 | Diseño y manufactura de carenados «fairings» aplicables a los trenes de aterrizaje del avión Diamond DA-20 de la Fuerza Aérea Ecuatoriana | ESCUELA POLITÉCNICA DEL EJÉRCITO, EXTENSIÓN LATACUNGA | 2017 |
Si quieres saber hasta donde llegaron, te invito a descargar las revistas «Aeroespacial, Investigación y Desarrollo»

https://www.academia.edu/113005474/REVISTA_AEROESPACIAL_No_4
https://www.academia.edu/113005520/REVISTA_AEROESPACIAL_No_6
