
Gustavo León1, Víctor Enríquez1, Franklin W. Salazar2, Julio F. Guallo3, Fernando Urrutia2, Jorge Buele2,4
gusta_091@hotmail.com, vxenriquez@gmail.com, fw.salazar@uta.edu.ec,
jguallo@espoch.edu.ec, fernandourrutia@uta.edu.ec, jorgebuele@uti.edu.ec
Este trabajo de investigación busca estimar la posición y la orientación(Actitud de un avión) de las aeronaves de la Fuerza Aérea durante el cumplimiento de las diferentes misiones de vuelo que esta organización realiza, para esto se estudia la posibilidad de emplear diferentes modelos matemáticos entre los cuales destacan las matrices de traslación y rotación, conversión de coordenadas Geográficas a UTM, regresiones polinomiales, cálculo del error cuadrático medio, y la definición de derivada; La información necesaria para el empleo de mencionados modelos es recopilada a través de componentes electrónicos que deberán ser instalados en las aeronaves objeto de análisis, una vez finalizada la misión de vuelo la información recopilada es procesada y presentada gráficamente a través de MatLab lo cual permitirá un análisis y evaluación del desempeño de la misión de vuelo, este análisis es previsto para luego ser implementado en plataformas de realidad virtual como Unity.
PALABRAS CLAVE:
Análisis aerodinámico; Sensor electro-óptico; Resistencia mecánica; Simulación por computador.
In this research work, a feasibility study is presented in order to install an electro-optical sensor on the Twin Otter DHC-6 aircraft of the Ecuadorian Air Force, to strengthen the strategic capacity of surveillance, reconnaissance and intelligence. The study took into consideration the limitations and restrictions inherent to the aircraft, which is why it was decided to make a temporary, non-invasive and easy to assemble installation. For the study of affectation, the aerodynamic, structural analysis, loads, weight and balance were considered. Mechanical components and a fairing have been designed in composite materials, so that the sensor attachment is safe and has an aerodynamic surface that reduces the drag coefficient generated. To validate this prototype, a comparison of the aircraft in its normal state with respect to the adhesion of this device is made through tests and simulations.
INTRODUCCIÓN
La aviación militar en el Ecuador inicia su historia casi un centenario, que con un sólido desarrollo institucional ha obtenido méritos nacionales e internacionales. Tras la implementación de la primera Escuela Militar de Aviación logra un desarrollo institucional valioso, lo cual la lleva a ser una de las pocas instituciones en Sudamérica que ha participado en combates en el aire (Loya et al., 2019). La Fuerza Aérea Ecuatoriana (FAE) al pertenecer a las Fuerzas Armadas (FFAA), cumple un papel importante en el ámbito militar y en el control del espacio aéreo (Mediavilla & Vélez, 2018). En la actualidad una de las necesidades de la FAE, es tener una plataforma aérea con un sistema de vigilancia y reconocimiento que le permita controlar zonas de conflicto y narcotráfico, específicamente en la f rontera norte del país (Castillo, Vásquez, Ramírez & Carrillo, 2016) (Medina-Pazmiño, Jara-Olmedo, Tasiguano-Pozo & Lavín, 2018). Así como también contribuir con información en tiempo real para la toma de decisiones, tanto en operaciones militares como para la gestión de riesgos y desastres naturales (Jara-Olmedo, Medina-Pazmiño, Galarza, Silva, Galarza & Naranjo, 2018).
De esta forma se evidencia la necesidad de desarrollo e innovación tecnológica, que permite el avance de la ciencia en el ámbito aéreo (Zeng et al., 2017) (Shari, Aziz, Sarbani & Ali, 2015). El Centro de Investigación y Desarrollo de la Fuerza Aérea Ecuatoriana (CIDFAE), elabora constantemente proyectos de investigación en la búsqueda del desarrollo de prototipos para aviones tripulados y no tripulados (UAV) (Cruz, Meneses, Aguilar & Andrade- Miranda, 2019). Una de estas líneas tiene como objetivo el diseñar y construir sensores electrópticos con un alto valor agregado nacional, para lo cual enfoca su modelo de gestión en trabajos conjuntos de investigación con la academia (Medina- Pazmiño, Jara- Olmedo & Valencia-Redrován, 2016). Se debe tomar en cuenta que, a pesar de ya contar con estos sensores, es necesario un estudio complementario que determine la factibilidad de su instalación. La colocación de estos sensores externos se debe realizar de una manera segura y confiable, teniendo en cuenta que las aeronaves militares no fueron diseñadas para este fin (Su et al., 2018). Es por ello que se requiere de estudios que determinen el correcto desempeño de la nave durante una misión de vuelo de vigilancia y reconocimiento, teniendo un elemento externo en su estructura f ísica (Mahmoud, Xu & Xu, 2016).
Los estudios previos en la etapa de diseño son de gran relevancia como se muestra en (Jara- Olmedo, Medina-Pazmiño, Mesías, Araujo-Villaroel, Aguilar & Pardo, 2018). En este trabajo se adapta una sensor electro-óptico/inf rarrojo diseñado y desarrollado por el CIDFAE, para un avión no tripulado (UAV por sus siglas en inglés), con el objetivo de detectar tráfico, realizar vigilancia de reconocimiento y la adquisición de blancos de oportunidad. Aquí se presenta una línea base para considerar la factibilidad para la implementación de este tipo de cámaras en otras aeronaves. En tal contexto en este artículo, se presenta la afectación estructural de la aeronave a integrarse un sensor electro-óptico a su fuselaje. Como caso de estudio se ha utilizado la aeronave Twin Otter DHC-6, en la cual se pretende predecir su comportamiento desde el punto de vista mecánico y aerodinámico. El análisis matemático del factor de seguridad que poseen las uniones atornilladas para sujetar el dispositivo es también desarrollado. Paralelamente se realiza un estudio de peso y balance obligatorio por la modificación estructural experimentada, que, aunque sea de un peso casi despreciable con relación al peso de la aeronave debe ser evaluada. La validación de esta propuesta se establece mediante la comparativa de la incidencia que tiene la instalación del equipo externo con respecto de una configuración en vacío, mediante las simulaciones y pruebas respectivas.
Este artículo se organiza de la siguiente manera: la introducción en la sección 1, en la sección 2 se muestra el análisis de afectación aerodinámica. En la sección 3 se presenta el análisis estructural. Los resultados de las pruebas experimentales realizadas y las conclusiones se describen en las secciones 4 y 5 respectivamente.
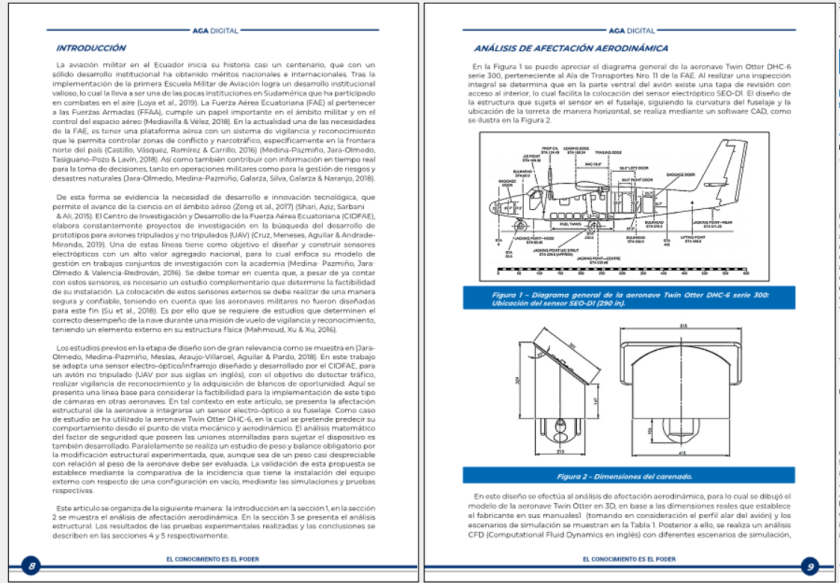
ANÁLISIS DE AFECTACIÓN AERODINÁMICA
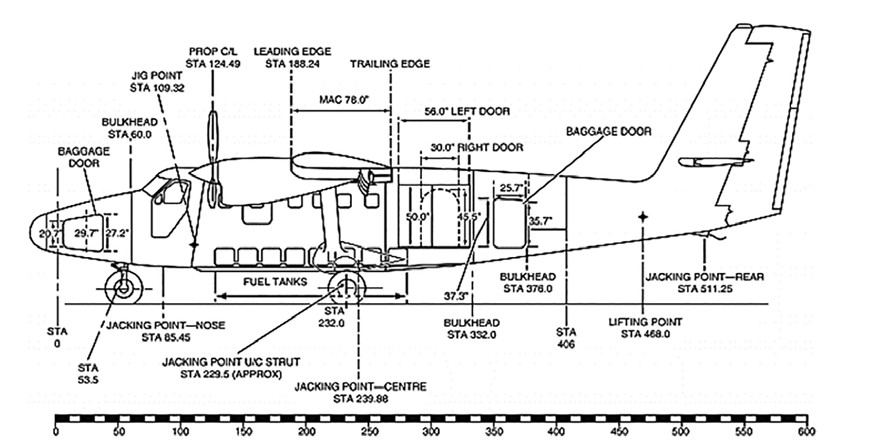
En la Figura 1 se puede apreciar el diagrama general de la aeronave Twin Otter DHC-6 serie 300, perteneciente al Ala de Transportes Nro. 11 de la FAE. Al realizar una inspección integral se determina que en la parte ventral del avión existe una tapa de revisión con acceso al interior, lo cual facilita la colocación del sensor electróptico SEO-D1. El diseño de la estructura que sujeta el sensor en el fuselaje, siguiendo la curvatura del fuselaje y la ubicación de la torreta de manera horizontal, se realiza mediante un software CAD, como se ilustra en la Figura 2.

En este diseño se efectúa al análisis de afectación aerodinámica, para lo cual se dibujó el modelo de la aeronave Twin Otter en 3D, en base a las dimensiones reales que establece el fabricante en sus manuales1 (tomando en consideración el perfil alar del avión) y los escenarios de simulación se muestran en la Tabla 1. Posterior a ello, se realiza un análisis CFD (Computational Fluid Dynamics en inglés) con diferentes escenarios de simulación que podrían suscitarse durante la operación y son relevantes. En cada escenario se realiza una simulación con la aeronave limpia (sin SEO-D1) y otra con la instalación del sistema. Una vez determinado el porcentaje de afectación en cada escenario, se escogió la fuerza de drag (eje longitudinal) de mayor valor para realizar un cálculo de la resistencia de los tornillos elegidos, que se sujetan al fuselaje de la aeronave y establecer un factor de seguridad.cto y nivelado.

Finalmente se realiza un análisis de peso y balance, en vista que la aeronave suf rirá la inclusión de un sistema para lo cual no fue considerada dentro de la sumatoria de momentos en el eje longitudinal. Dicho estudio se desarrolló en base a las gráficas de
1 https://www.vikingair.com/customer-support/technical-publications?page=28
límites de centro de gravedad dadas por el fabricante, estableciendo el nuevo centro de gravedad, tomando en cuenta el peso de todo el sistema (sensor, estructura, computadora, batería, etc.), con referencia al datum del avión.
Mallado
La calidad de mallado es uno de los parámetros que influyen en los resultados de las simulaciones, ya que a partir de ello se crean los nodos para el análisis CFD de elementos finitos de la simulación. Para el modelo planteado, se diseñó una malla basada en la curvatura con un grado de refinamiento inicial igual a tres. Su composición se aprecia en la Figura 3 en la que se puede observar en escala de colores el nivel de refinamiento. El refinamiento máximo establecido para este análisis fue de seis, y la calidad de mallado varió acorde a la ubicación en la aeronave; utilizando la malla más densa en los lugares más complejos de la curvatura del modelo CAD de la aeronave.

Simulación
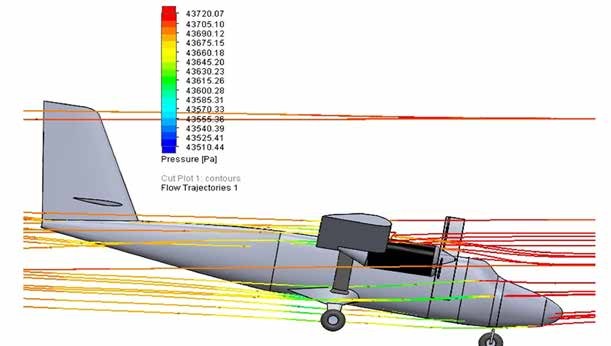
En la Figura 4 se pueden observar los resultados de la simulación en una configuración de aterrizaje sin el sensor electróptico SEO-D1, las líneas de fluido corresponden a un cambio de presión como consecuencia del impacto del aire sobre el fuselaje en la posición de descenso.
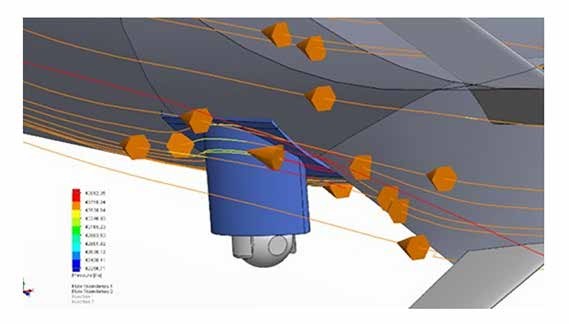
En la Figura 5 se observa cómo se orientan las líneas de fluido sobre el carenado, diseñado para reducir la fuerza de drag del sensor electróptico, que se instalará en la parte exterior del avión.

ANÁLISIS ESTRUCTURAL
Estudio de carga en los tornillos
Para este tipo de estudio, se requiere realizar un contraste estructural para establecer si los elementos tendrán la resistencia requerida al realizar tareas de vigilancia y exploración. Para determinar si la unión atornillada sometida a los esfuerzos cortantes y resistentes a tracción simultáneos es correcta, se utilizó la fórmula descrita en (1). Dichas fórmulas se utilizaron para incluir cargas axiales y transversales de manera simultanea de acuerdo a los factores de carga de un escenario en vuelo. De esta manera se consigue un resultado más conservador en el diseño, a pesar de no presentar un análisis tan exhaustivo.

Donde;
Fv, Ed : Fuerza cortante (perpendicular al eje del tornillo).
Fv, Rd : Fuerza resistente a cortante.
Ft , Ed : Fuerza axial, (paralela al eje del tornillo) es el peso exterior que soporta los tornillos.
Ft , Rd : Fuerza resistente a tracción.
La fuerza cortante se la obtuvo encontrando el módulo del vector resultante entre la fuerza longitudinal ( FL ) y transversal ( FT ) que actúa sobre el carenado en una de las fases de vuelo críticas, como se describe en (2). Se tomaron los valores en el escenario de un vuelo crucero, como un efecto del impacto del aire sobre esa superficie y que idealmente se transmite de forma equitativa a la unión atornillada.

La fuerza resistente a cortante de la unión, para el tipo de tornillo empleado (NAS 517-3-9) sujeto al análisis está dada por la expresión mostrada en (3).

Donde;
Fub : Resistencia última a tensión del tornillo.
AS : Área resistente a tracción del tornillo.
γ Mb : Coeficiente parcial de seguridad.
En cuanto al coeficiente parcial de seguridad se lo estimó en 1,25. Además, como la sujeción del sensor electro-óptico SEO-D1 se ajusta a 8 tornillos, la resistencia total de la unión atornillada se calculó multiplicando la expresión expresada en (3) por el número de tornillos empleados (N). Entonces se tiene (4):

Para la fuerza resistente a tracción de la unión para el tipo de tornillo empleado (NAS517-3-9) sujeto al análisis, se tiene la expresión de (5).

Una vez obtenidos los datos de la fuerza resistente a cortante y de la fuerza resistente a tracción de la unión atornillada, se procede a calcular si los esfuerzos provocados por las fuerzas tangentes y axiales que suf re el tornillo de manera simultánea. Los valores obtenidos en (2), (4) y (5) se reemplazan en (1) para verificar que se cumplen con las condiciones iniciales y reemplazando se obtiene lo siguiente.

Con esta expresión se pudo determinar que la unión atornillada propuesta fácilmente soportaría el tipo de cargas analizadas.
RESULTADOS EXPERIMENTALES
En la Tabla 2 se presenta un cuadro resumen de los resultados de cada escenario de simulación en el eje longitudinal con su respectivo porcentaje de variación, con relación a una configuración de la nave limpia.

De la misma manera, se visualiza en la Tabla 3 un cuadro resumen de los resultados de cada escenario de simulación en el eje trasversal con su respectivo porcentaje de variación, con relación a una configuración de la nave limpia.
Estudio de peso y balance
Para el análisis de peso y balance del avión Twin Otter DHC-6, concibe la afectación longitudinal y se toma en cuenta los datos descritos en la tabla 42.
2 http://www.anac.gob.ar/anac/web/uploads/normativa/reglamentacion/advertencias/adv080dag.pdf

Cálculo teórico del % CG
La aeronave objeto del estudio tiene un peso en vacío de fábrica de 7440 lb y por defecto se encuentra ubicado en el punto medio del intervalo del centro de gravedad (CG) permisible, es decir al 28% de la cuerda aerodinámica media (MAC), que representa una distancia de 210,08 in, medidos desde el datum colocado por el fabricante3.
Los límites del centro de gravedad de la aeronave oscilan entre el 20% y 36%, el valor medio entre estos dos valores mínimos y máximos corresponde a un valor del 28%, que representa un brazo de palanca (ARM) medido desde el datum de 210,08 in. Se realizaron los cálculos para la sumatoria de momentos con la aeronave en vacío, tomando en consideración el peso de todo el sistema (interno y externo) se presentan en la Tabla 5 y el cálculo del CG en (6).

3 https://www.scribd.com/document/358542710/c-twin-otter-dhc-6-flight-manual-pdf
Cabe considerar, que la instalación del sensor electro-óptico provoca un movimiento en el centro de gravedad hacia la derecha, dicha variación se calcula en (7), mediante la diferencia del CG inicial con la aeronave en vacío y el nuevo CG.

Este valor permite interpretar que el CG se movió aproximadamente 0,29 in hacia la derecha debido a la instalación del sensor. Además, este valor puede ser expresado como un porcentaje del MAC tomando como referencia que la longitud total del MAC es 78 in, con lo cual se tiene un desplazamiento del 0,37%.
Límites del CG
Con los parámetros encontrados en la sección anterior, se procedió a evaluar a la aeronave DHC-6 Twin Otter de la Fuerza Aérea Ecuatoriana, revisando los últimos reportes de peso y balance, a fin de que se encuentren dentro de los límites establecidos por el fabricante2. Por tanto, la instalación del sensor electro-óptico SEO-D1 tomando en cuenta los cálculos de las secciones anteriores, se presenta como resumen en la Tabla 6.

CONCLUSIONES
A través de este estudio, se constató la factibilidad para adecuar un sensor electróptico en el avión TWIN OTTER DHC-6 serie 300, que dispone la Fuerza Aérea Ecuatoriana. En el caso del estudio aerodinámico por elementos finitos, este determinó que la instalación del sensor electróptico SEO-D1, tiene una afectación que oscila entre 0.49% y 10%, siendo principalmente la etapa de aterrizaje la más crítica dentro de la operación de la aeronave.
Además, el estudio de carga en los tornillos, determinó que estos fácilmente soportarán todas las cargas de vuelo o cargas dinámicas, y mucho más las cargas estáticas. El análisis de peso y balance del avión, debido a una modificación estructural y al incremento de
27 lbs de peso a una distancia de 290 pulgadas, provoca que el centro de gravedad se mueva hacia la derecha en un porcentaje de 0,37%. Por tanto y en base a los análisis realizados, se puede asegurar que los componentes mecánicos que fueron diseñados para la instalación del SEO-D1 se acoplan de una manera eficiente en la aeronave.
La elaboración de este trabajo constituye una base para la obtención del certificado de aeronavegabilidad por parte de los órganos correspondientes dentro de la Fuerza Aérea. Esto faculta a la institución la operabilidad de un sistema de vigilancia y reconocimiento con tecnología propia que fortalezca la capacidad estratégica de vigilancia y reconocimiento en el Ecuador.
Trabajo publicado en la Revista de la Academia de Guerra Aérea de la Fuerza Aérea Ecuatoriana.
AGA DIGITAL MARZO 2023





Continúa navegando en el blog:
REFERENCIAS
Castillo, R. D. F., Vásquez, J. P. R., Ramírez, P. H. A., & Carrillo, M. G. G. (2016).
Consideraciones para el rediseño de la línea de ensamble de vehículos aéreos no tripulados desarrollados por la Fuerza Aérea Ecuatoriana. INGE CUC, 12.1, 51-64.
Cruz, H., Meneses, J., Aguilar, W., & Andrade-Miranda, G. (2019). Detection and Segmentation of Ecuadorian Deforested Tropical Areas Based on Color Mean and Deviation. Advances in Intelligent Systems and Computing, 918,452-461. Springer.
Jara-Olmedo, A., Medina-Pazmiño, W., Galarza, E. E., Silva, F. M., Galarza, E. D., & Naranjo, C.
A. (2018). Data Link System Flight Tests for Unmanned Aerial Vehicles. Smart Innovation, Systems and Technologies, 94, 151-161. Springer.
Jara-Olmedo, A., Medina-Pazmiño, W., Mesías, R., Araujo-Villaroel, B., Aguilar, W. G., & Pardo, J. A. (2018). Interface of Optimal Electro-Optical/Inf rared for Unmanned Aerial Vehicles. Smart Innovation, Systems and Technologies, 94, 372-380. Springer.
Loya, H., Enríquez, V., Salazar, F. W., Sánchez, C., Urrutia, F. & Buele, J. (2020).
Analysis and Determination of Minimum Requirements of an Autopilot for the Control of
Unmanned Aerial Vehicles (UAV). Advances in Intelligent Systems and Computing, 1078, 129-142. Springer.
Mahmoud, A., Xu, D., & Xu, L. (2016). Optical design of high resolution and shared aperture electro-optical/inf rared sensor for UAV remote sensing applications.
2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), 2921-2924. IEEE.
Mediavilla, J. R., & Vélez, A. J. (2018). Hacia la unificación de radares civiles y militares: Sistema de integración de la señal de radares de la Dirección General de Aviación Civil como apoyo a la Defensa y Seguridad del espacio aéreo ecuatoriano. RISTI – Revista Iberica de Sistemas e Tecnologias de Informacao, E15, 66-75.
Medina-Pazmiño, W., Jara-Olmedo, A., Tasiguano-Pozo, C. & Lavín, J. M. (2018).
Analysis and implementation of ETL system for unmanned aerial vehicles (UAV). Advances in Intelligent Systems and Computing, 721, 653-662. Springer.
Medina-Pazmiño, W., Jara-Olmedo, A. & Valencia-Redrován, D. (2016). Analysis and determination of minimum requirements for a data link communication system for unmanned aerial vehicles-UAV’s. 2016 IEEE Ecuador Technical Chapters Meeting (ETCM), 1-6. IEEE.
Shari, A. Z., Aziz, A. A. A., Sarbani, N., & Ali, M. T. (2015). A design of rectangular Aeroplane shape Defected Ground Structure (RADGS) antenna for 2.4 GHz applications. 2015 Innovation & Commercialization of Medical Electronic Technology Conference (ICMET), pp. 13-16. IEEE.
Su, D., Zhang, X. Y., Ma, Y. L., Shan, F., Wu, J. Y., Fu, X. C., … & Zhang, T. (2018).
Real-Time Electro-Optical Tunable Hyperlens Under Subwavelength Scale. IEEE Photonics Journal, 10.1, 1-9.
Zeng, M., Li, Y., Fang, W., Lu, W., Liu, X., Yu, H., & Zhu, Z. (2017). Control plane innovations to realize dynamic formulation of multicast sessions in inter-DC software-defined elastic optical networks. Optical Switching and Networking, 23, 259-269.
Sigue mi blog
«Sé tú mismo, los demás puestos están ocupados» Oscar Wilde
