
Autores: Valencia-Redrován David (1), Guijarro-Rubio Octavio (1), Basantes-Montero David (1), Enríquez Champutiz Víctor Xavier(1).
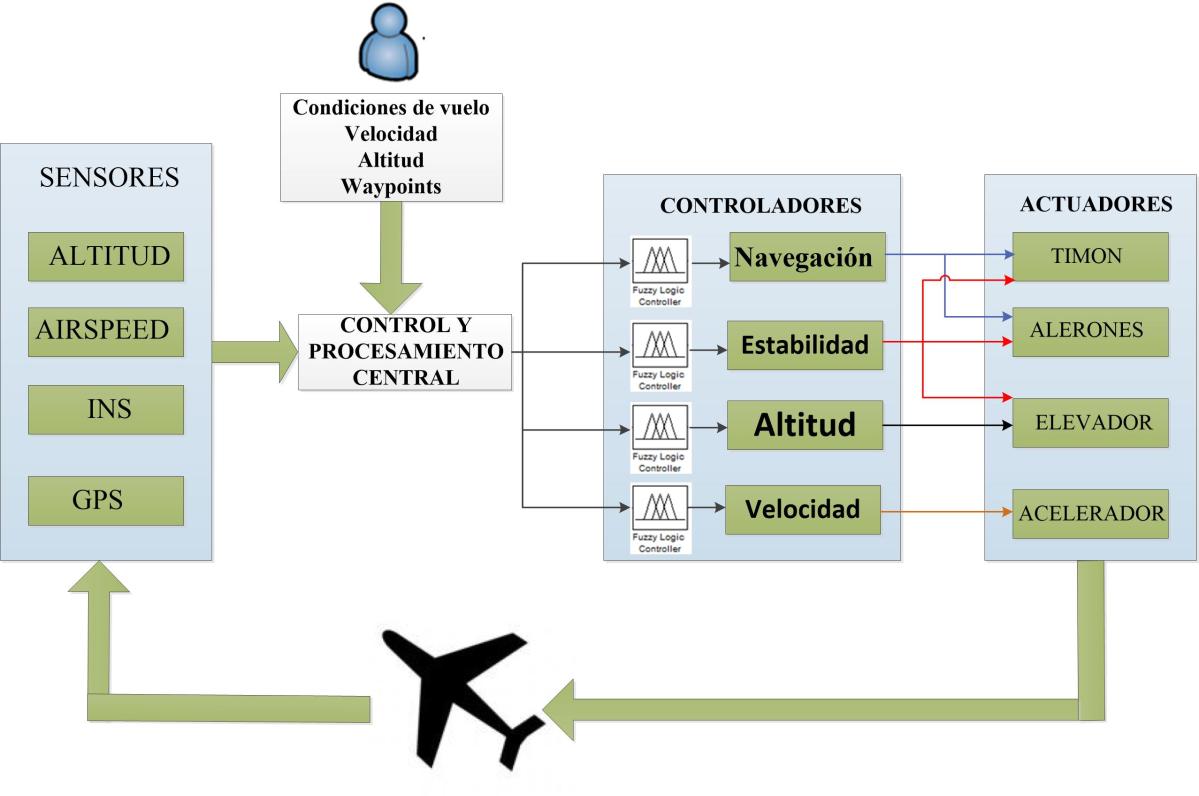
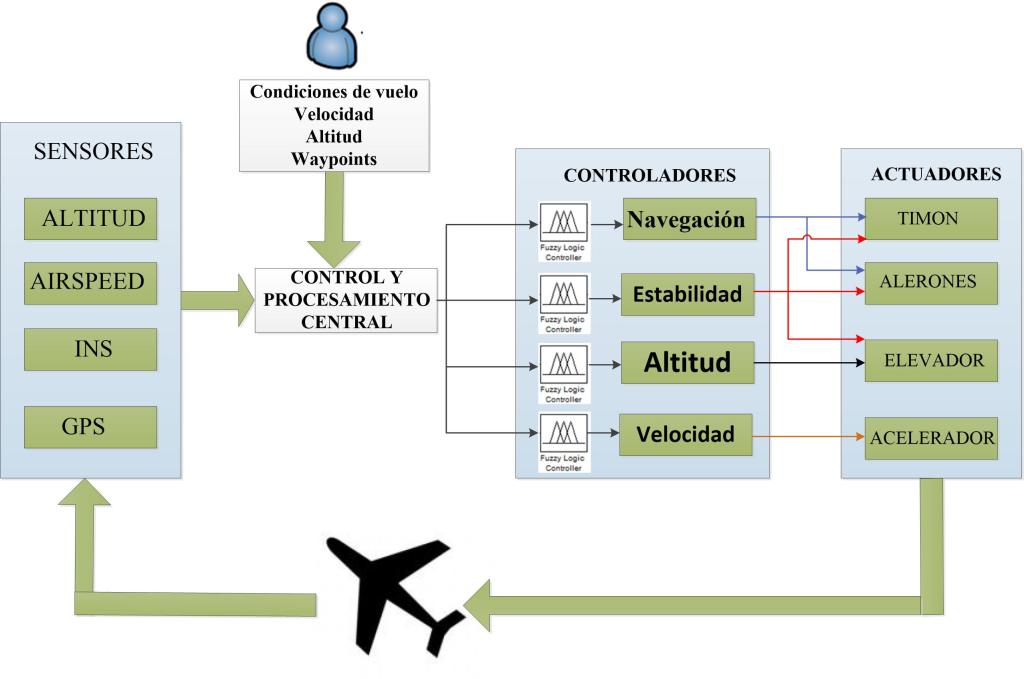
| Resumen. Los UAV (Unmanned Aerial Vehicles) han demostrado sus enormes capacidades en aplicaciones militares y civiles en los últimos años. Se han convertido en una herramienta indispensable en el ámbito de defensa, seguridad y apoyo al desarrollo de una nación. De igual manera el desarrollo tecnológico ha permitido que estas aeronaves vuelen de manera autónoma gracias a sistemas de control electrónicos llamados autopilotos. La arquitectura funcional del autopiloto presentado en este documento basa su funcionamiento en lógica difusa para el control completo de la aeronave, tanto en estabilidad, altitud, trayectoria, dirección y aceleración usando el mínimo de controladores posibles reduciendo el procesamiento computacional. El sistema que presentamos es puesto a prueba con múltiples horas de vuelo en distintas condiciones climáticas, los resultados son satisfactorios y el sistema se muestra prometedor. Tanto el hardware y software del sistema de control propuesto, como la aeronave, son de producción ecuatoriana | Abstract. Unmanned Aerial Vehicles (UAVs), also known as drones, have demonstrated their immense capabilities in both military and civilian applications over the past few years. They have become an indispensable tool in the fields of defense, security, and national development. Technological advancements have enabled these aircraft to fly autonomously using electronic control systems called autopilots. The functional architecture of the autopilot presented in this document is based on fuzzy logic for complete control of the aircraft, including stability, altitude, trajectory, direction, and acceleration, using the minimum number of controllers possible to reduce computational processing. The proposed system has been thoroughly tested through multiple hours of flight under various climatic conditions, yielding satisfactory results and demonstrating its promising potential. Both the hardware and software of the proposed control system, as well as the aircraft itself, are of Ecuadorian origin. |
Este trabajo da inicio a una línea de investigación en sistema de pilotos automáticos para UAV de producción Ecuatoriana. Como trabajo futuro se propone implementar este sistema en la aeronave UAV- Gavilan-2 siendo esta la principal aeronave no tripulada con la que cuenta la Fuerza Aérea Ecuatoriana. El sistema a implementar conservaría el principio de funcionamiento pero adecuándolo a las características de la aeronave, ya que Gavilan-2 posee casi el doble de largo en las alas (7,5 mts), peso superior (293 lbs), autonomía de 5 horas, un techo de vuelo superior (15.000 pies), velocidad máxima superior (130km/h).
Para descarga del artículo completo:
Continúa navegando en el blog:
Sigue mi blog
«Sé tú mismo, los demás puestos están ocupados» Oscar Wilde
